![]()
bayesImageS implements algorithms for segmentation of 2D
and 3D images, such as computed tomography (CT) and satellite remote
sensing. This R package provides functions for Bayesian image analysis
using a hidden Potts/Ising model with external field prior. Latent
labels are updated using chequerboard Gibbs sampling or Swendsen-Wang.
Algorithms for the smoothing parameter include:
Stable releases, including binary packages for Windows & Mac OS, are available from CRAN:
install.packages("bayesImageS")The current development version can be installed from Bitbucket:
devtools::install_git("https://bitbucket.org/Azeari/bayesimages/")To generate synthetic data for a known value of \(\beta\):
set.seed(1234)
mask <- matrix(1,3,3)
neigh <- getNeighbors(mask, c(2,2,0,0))
blocks <- getBlocks(mask, 2)
k <- 3
beta <- 0.7
res.sw <- swNoData(beta, k, neigh, blocks, niter=200)
z <- matrix(max.col(res.sw$z)[1:nrow(neigh)], nrow=nrow(mask))
image(z, xaxt = 'n', yaxt='n', col=rainbow(k), asp=1)
Now add some Gaussian noise to the labels, according to the prior:
priors <- list()
priors$k <- k
priors$mu <- c(-2, 0, 2)
priors$mu.sd <- rep(0.5,k)
priors$sigma <- rep(0.25,k)
priors$sigma.nu <- rep(3, k)
priors$beta <- c(0,1.3*log(1 + sqrt(k)))
m0 <- sort(rnorm(priors$k,priors$mu,priors$mu.sd))
SS0 <- priors$sigma.nu*priors$sigma^2
s0 <- 1/sqrt(rgamma(priors$k,priors$sigma.nu/2,SS0/2))
l <- as.vector(z)
y <- m0[l] + rnorm(nrow(neigh),0,s0[l])
library(lattice)
levelplot(matrix(y, nrow=nrow(mask)))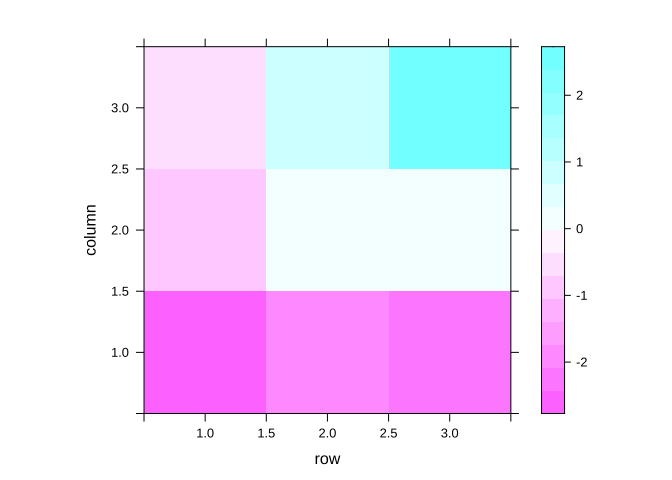
Image segmentation using ABC-SMC:
res.smc <- smcPotts(y, neigh, blocks, priors=priors)
#> Initialization took 66sec
#> Iteration 1
#> previous epsilon 7 and ESS 10000 (target: 9500)
#> Took 0sec to update epsilon=2.625 (ESS=9505.29)
#> Took 58sec for 8918 RWMH updates (bw=0.497509)
#> Took 4sec for 10000 iterations to calculate S(z)=7
#> Iteration 2
#> previous epsilon 2.625 and ESS 9505.29 (target: 9030.02)
#> Took 7sec to update epsilon=1 (ESS=7970.86)
#> Took 55sec for 7671 RWMH updates (bw=0.466951)
#> Took 4sec for 10000 iterations to calculate S(z)=6
#> Iteration 3
#> previous epsilon 1 and ESS 7970.86 (target: 7572.32)
#> Took 7sec to update epsilon=4.66632e-302 (ESS=7949.67)
#> Took 55sec for 7968 RWMH updates (bw=0.466673)
#> Took 4sec for 10000 iterations to calculate S(z)=7
# pixel classifications
pred <- res.smc$alloc/rowSums(res.smc$alloc)
predMx <- as.raster(array(pred, dim=c(nrow(mask),ncol(mask),3)))
plot(c(0.5,3.5),c(0.5,3.5),type='n',xaxt='n',yaxt='n',xlab="",ylab="",asp=1)
rasterImage(t(predMx)[nrow(mask):1,], 0.5, 0.5, 3.5, 3.5, interpolate = FALSE)
Note that CODA ignores the particle weights, so we need to resample to obtain accurate HPD intervals. This step is not usually necessary and does introduce some noise due to duplication of particles. Depending on how many SMC iterations have been performed, one or more resampling steps might have already been done (but not in this specific example).
seg <- max.col(res.smc$alloc) # posterior mode (0-1 loss)
all.equal(seg, l)
#> [1] TRUE
# filter weights to remove Ninf, NaN
w <- res.smc$wt
w[is.na(w)] <- 0
plot(density(res.smc$beta, weights=w),main=expression(paste("Posterior for ",beta)))
abline(h=0,lty=3)
abline(v=beta,lty=2,col=4)
abline(v=log(1 + sqrt(k)),lty=3,col=2) # critical point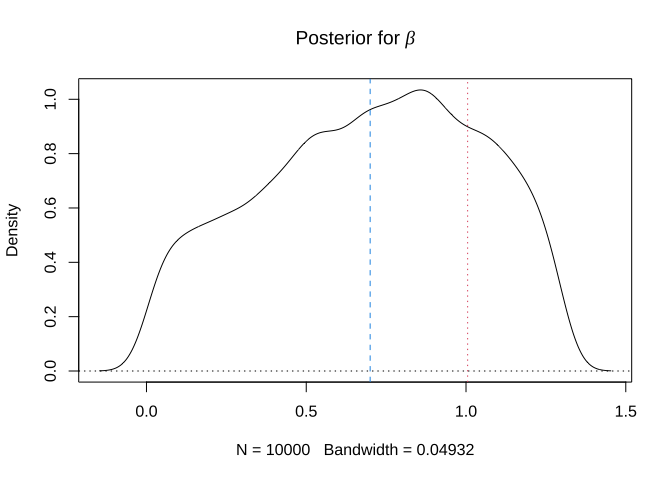
library(coda)
res.res <- testResample(res.smc$beta, w, cbind(res.smc$mu, res.smc$sigma))
#> Took 1sec to resample 10000 particles
res.coda <- mcmc(cbind(res.res$pseudo, res.res$beta))
varnames(res.coda) <- c(paste("mu",1:k), paste("sd",1:k), "beta")
HPDinterval(res.coda)
#> lower upper
#> mu 1 -2.56248597 -1.9038983
#> mu 2 -0.50953511 0.4881316
#> mu 3 1.37933533 2.7939284
#> sd 1 0.11321785 0.4984628
#> sd 2 0.22470066 0.9154286
#> sd 3 0.11011734 0.9105506
#> beta 0.09338037 1.2852256
#> attr(,"Probability")
#> [1] 0.95
m0
#> [1] -2.279614 0.156580 2.208122
s0
#> [1] 0.2785175 0.6092555 0.3153176
beta
#> [1] 0.7